
RobotX
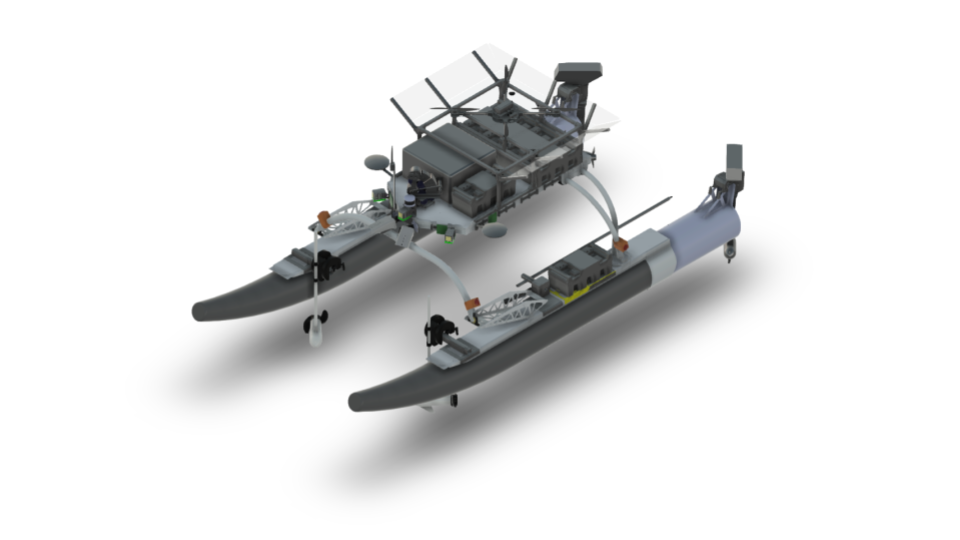
Our 2022 RobotX multi-domain system consisted of a Unmanned Surface Vessel (USV) and Unmanned Air Vehicle (UAV)

2022 Season Recognition
RobotX - 1st Place Design Presentation
RobotX - 1st Place Team Introduction Video
RobotX - 2nd Place Design Documentation
RobotX - Excellence in Logistics Compliance

ME - USV
Weight
425kg
Top Speed
10 knots
Degrees of Freedom
3 (Surge, Sway, Yaw)
Power System
Motors: 3,500 Wh Smart Lithium (x2)
Electronics: 600Wh LiFePO4 (x2)
Emergency stop: 216Wh Ni-Cd
Perception Sensors
Oak–D camera for stereo vision and object detection (x2)
Livox Horizon LiDAR for distance detection and collision avoidance (x2)
Wireless Communications
5.8GHz Ubiquiti Rocket 5 AC PrismRC (x2)
45° sector antenna
High gain omni antenna
Wifi
RC 900Mhz
Dimensions
4.8 m x 2.4 m x 1.9 m
Endurance
Full Throttle – 1.5 hours runtime
Normal Usage – 8 hours runtime
Main Processor
Jetson Xavier AGX
Propulsion System
Torqeedo Cruise 2.0L Motor w actuator (x2)
Blue Robotics T500 motors (x4)
Navigation System
Millimeter Precision GPS RTK
Dual Antenna GPS Heading
Software Architecture
Robot Operating System (ROS)
Payload
Drone landing platform
Racquetball launcher
Acoustics
Hydrophone array of AS-1 Hydrophones and custom digitally adjustable notch filter circuit
Drone - UAV

Weight
With payload: 5.5 kg
Without payload: 3.6kg
Top Speed
3m/s
Degrees of Freedom
3 Translational (Longitude, Latitude, Altitude)
3 Rotational (Roll, Pitch, Yaw)
Power System
Main: 325Wh 6s Lithium battery
Payload: 37Wh 3s Lithium Battery
Perception Sensors
RangeFinder Lidar
Hyperspectral Camera
Wireless Communications
Wifi
Long Range 918-926Mhz Telemetry
RC 900Mhz
Dimensions
Folded: 16”x16”x23”
Expanded: 28”x28”x16”
Stator to Stator: ~1m
Endurance
w payload – 20 minutes hover
w/o payload – 32 minutes hover
Main Processor
Raspberry Pi 4B 8GB (companion computer)
Propulsion System
5kg thrust 380kv motor (x4)
18” Carbon Fiber Propellor (x4)
Navigation System
Pixhawk
Centimeter Precison GPS RTK
Software Architecture
Robot Operating System (ROS)
Rasbian Buster ARM64
Payload
1080p 30FPS camera: Downward Static
1080p 30FPS camera: Forward Gimbal
Hyperspectral Camera
Tin-Can Grabber