MINI-ME - Electrical
RobotX > MINI-ME - Electrical
Overview
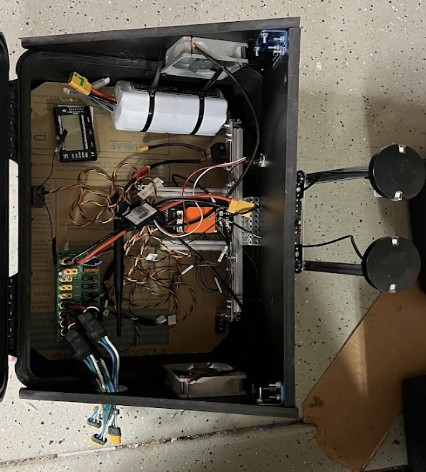
With an initial goal of basic RC control, we developed our barebones electronics system within a 20” x 14” Pelican case. By drilling holes through the sides, we routed our motor wires into the box and let an antenna out for our radio receiver. Each T200 motor was connected to a Blue Robotics Basic ESC which then connected to our flight controller, a PixHawk Cube Orange. The Pixhawk contains several internal redundant sensors including both compasses and IMUs essential for navigation. We also used two Here3 GPSes with an RTK system to provide centimeter level positioning data to the Pixhawk. Our comms were established through an RFD900x Long Range telemetry system which also interfaced directly through the Pixhawk. Everything was powered with two Blue Robotics 16Ah batteries in parallel allowing for roughly 4 hours of run time during testing.