
ME - Software
RobotX > ME - Software
Overview
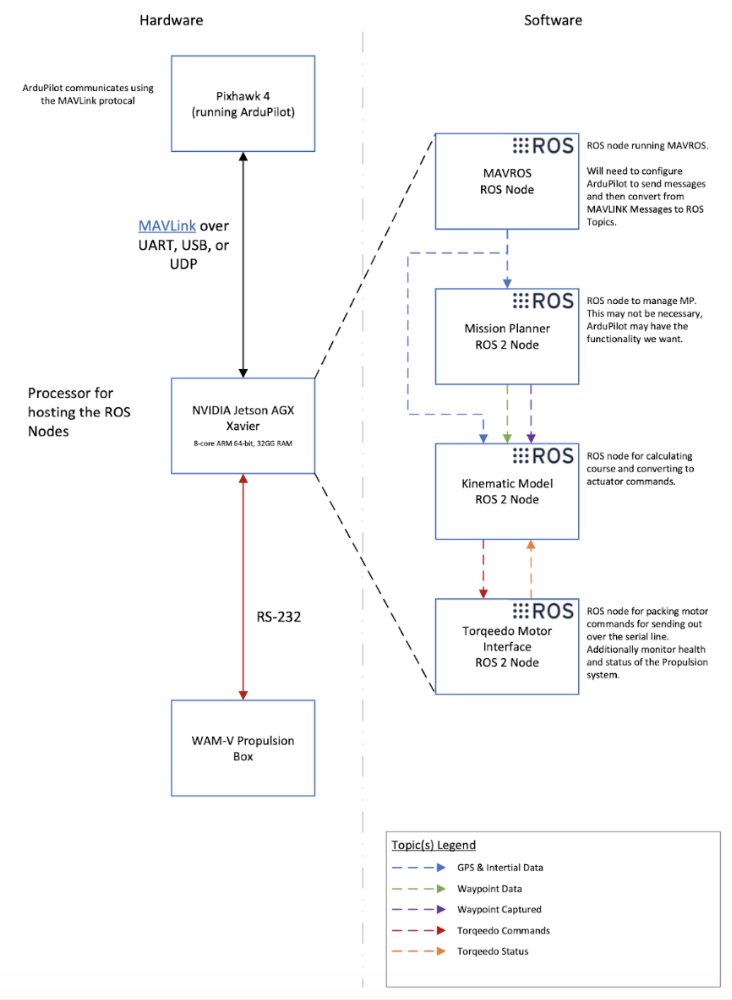
As per the software architecture diagram, ROS nodes hold minimal yet specific functions to divide the code into testable parts. Sensors such as the GPS, cameras, and LiDARS each had their own nodes devoted to data collection. A Mapper node fused the information from these nodes and created a grid-like map of the WAM-V’s surroundings. Based on this knowledge of mission targets and obstacles, the Mission Planner node creates a safe path for the WAM-V to traverse, and passes waypoints to the waypoint navigator node. The waypoint navigator node, one of the key functionalities tested in VRX, calculates motor commands to move the WAM-V to the specified waypoint.
Saving coordinates of the buoy within the FOV of the python camera to provide to the USV for navigation
VRX Simulation
The VRX competition presented an opportunity to develop preliminary software. Participating in VRX allowed us to learn about the structure of the WAM-V code before the physical boat was ready for us to test on. We used VRX to test waypoint and station keeping functionality which serves as a baseline for the physical boat navigation.
When designing the software architecture, we used the same structure of topic names as VRX. We also mimicked the approach of sending thruster commands to a topic. This similar structure allowed us to easily test the same software on the WAM-V and simulator with minimal effort.
