
MINI-ME - Mechanical
RobotX > MINI-ME - Mechanical
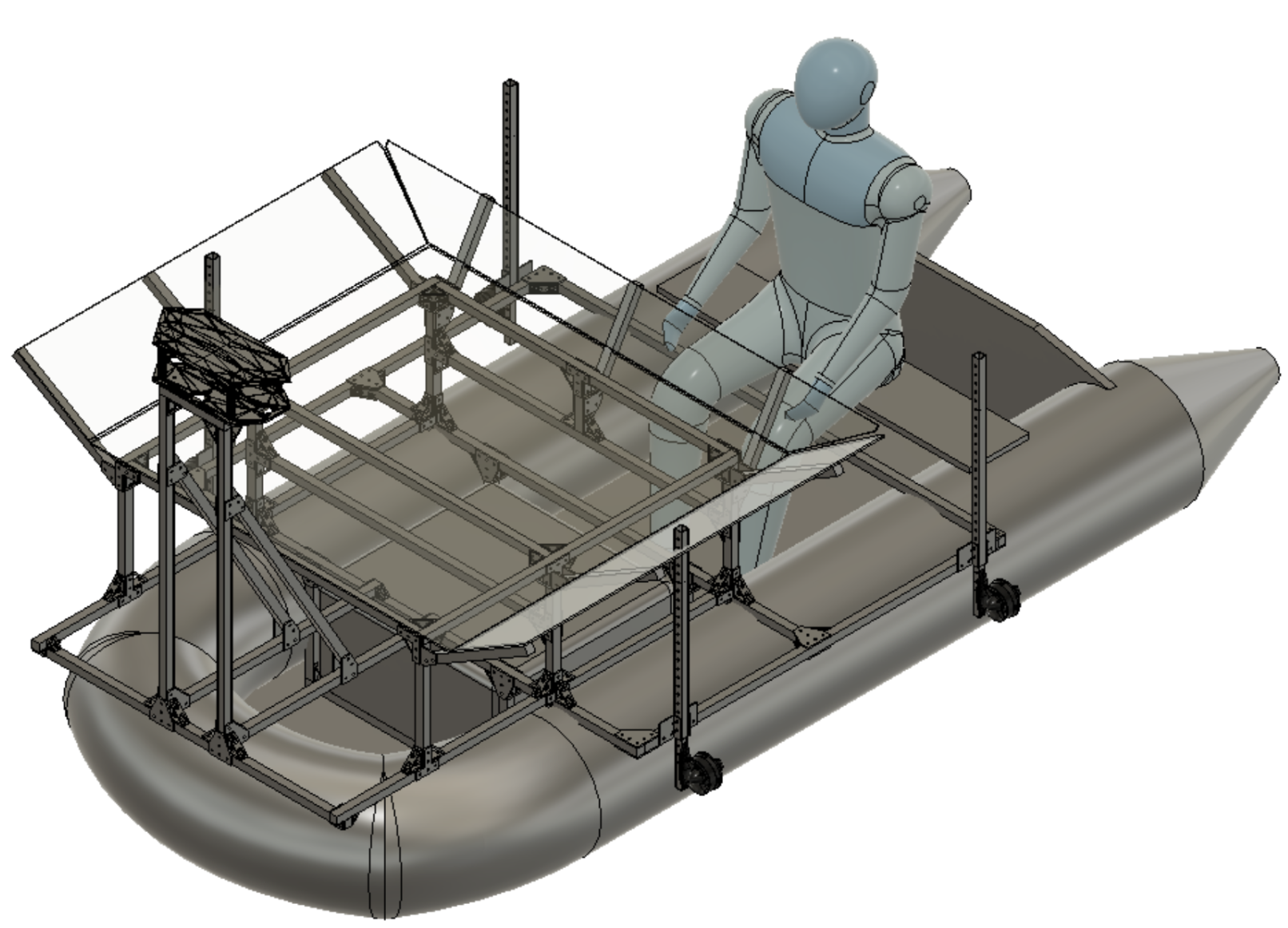
As a rookie RobotX team we were significantly unfamiliar with the dynamics of a water based USV, especially something as large as the WAM-V. Similar to our progression in Robosub, before even getting our competition vehicle we made a smaller prototype, in this case a fishing raft, aptly named “Mini-Me”. The Mini-Me was configured with four vectored T200 thrusters mounted using an 8/20 T-Slotted profile frame. The thruster configuration took heavy inspiration from our experience in Robosub and so did our electronics and control system.
Our boat frame interfaced with an Achilles LEX-96 inflatable catamaran, and included places to attach sensor and radio masts, as well as retractable arms for BlueRobotics T200 thrusters arranged in holonomic drive.
Prototype Boat
Related Build Blogs
https://www.teaminspiration.global/inspbuildblogs/2022/10/4922-measuring-lex-96-for-final.html
https://www.teaminspiration.global/inspbuildblogs/2022/10/42122-drone-platform-moved-forward.html
https://www.teaminspiration.global/inspbuildblogs/2022/10/61022-edits-to-prototype-boat.html
https://www.teaminspiration.global/inspbuildblogs/2022/10/61122-in-pool-and-water-testing.html
https://www.teaminspiration.global/inspbuildblogs/2022/10/61222-plugging-gaps.html
https://www.teaminspiration.global/inspbuildblogs/2022/10/61422-altering-interface-plate.html
https://www.teaminspiration.global/inspbuildblogs/2022/10/61622-fan-shroud.html
https://www.teaminspiration.global/inspbuildblogs/2022/10/61722-motor-savers.html
https://www.teaminspiration.global/inspbuildblogs/2022/10/61822-physical-cross-section-of-motor.html