
Drone Software
RobotX 2024 > Drone Software
Overview
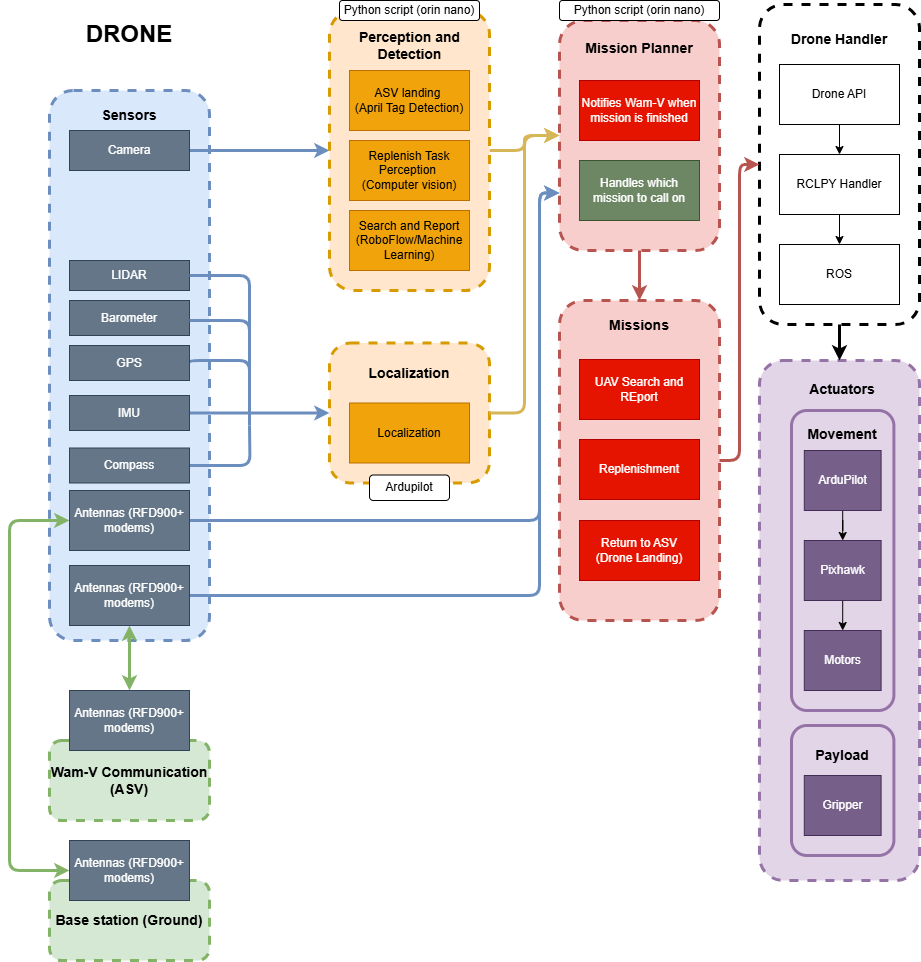
We simultaneously developed our code on 3 of the same drone platforms to maximize time. Triton-AI, capstone students, and Keith Chen were the ones that had possession of the drones. The drone system integrates multiple sensors: camera, gps, barometer, inertial measurement unit (IMU), communication systems, and control systems to enable autonomy. The drone utilizes a three-pronged approach in localization: RoboFlow enables machine learning to localize against missions models of search and report and replenish tasks, april tags to localize to land back on the ASV, and computer visions to localize search and report missions.
UAV Search & Report CSE 145/237
The primary goal of our the CSE 145/237 2024 Spring quarter capstone teams was to build a prototype UAV that can survey a delimited area (either autonomously or controlled by a pilot), detect the target objects, perform sensor fusion and combine the readings to detect the precise positions of the targets. To achieve this, we assembled a prototype drone using off-the-shelf components, integrated it with a companion computer, implemented our algorithms on this unit and combined all the modules together to achieve good results. Throughout the quarter, we successfully deployed a working prototype and tested our algorithms (finding some weaknesses which we were able to improve), ending up with a solid solution that can be adapted by the Triton-AI team for their competition drone.
UAV Drone Replenishment CSE 145 SP 24
The CSE 145 Spring Quarter 2024 capstone project, UAV Drone Replenishment, addressed the task which requires the drone to take off from the boat, identify two landing pads, transfer a tin can from one helipad to the other, and land back on the boat. During the course of this project, the team successfully assembled the drone hardware and implemented the helipad object detection model. The development of OpenCV tin can detection is still in progress, and the autonomous flight control software is a stretch goal for future development. This project is a part of Triton-AI, and was conducted under the guidance of Professor Kastner and fellow staff for CSE 145 (Embedded System Design Project).