
RoboBoat 2025
With our second generation team taking lessons from RoboSub 2024 and RobotX 2024, we hope to push our performance to new heights at Nathan Benderson Park (Sarasota, FL) from March 4th - 9th, 2025 in our second RoboBoat competition year using our Autonomous Surface Vessel (ASV), Barco Polo.
Competition Strategy
Team Inspiration’s RoboBoat team consists of 4 core team members and 10 supporting members, with a team range from 8th grade to college senior. For the first time in our team’s history, our software team was based on the West Coast of Florida — this, combined with limited manpower, led us to focus on augmenting our existing ASV, Barco Polo, instead of building a new ASV, despite the considerable technical difficulties encountered during the 2024 season. Mitigation of technical difficulties inherited from last year revolved around the electrical system — we worked hard to modify our electrical box, changing out faulty regulators, improving device placement, and increasing the workmanship quality overall.
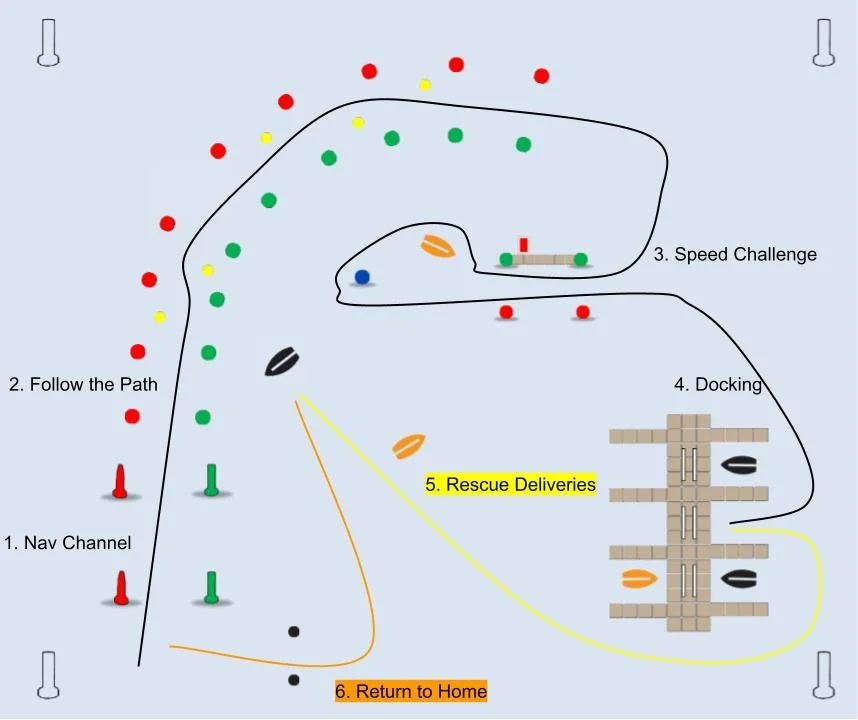
We planned to begin the process of building a robust system that would have the capabilities to attempt all six missions, designing a custom water gun and racquetball launcher to complete the Rescue Deliveries task. We additionally completely overhauled our software architecture combining the modularity and perception of our RoboSub 2023/24 architecture with the localization capabilities developed for our RobotX 2024 system, using a rudimentary simultaneous mapping and localization (SLAM) system for the first time.
Barco Polo - ASV
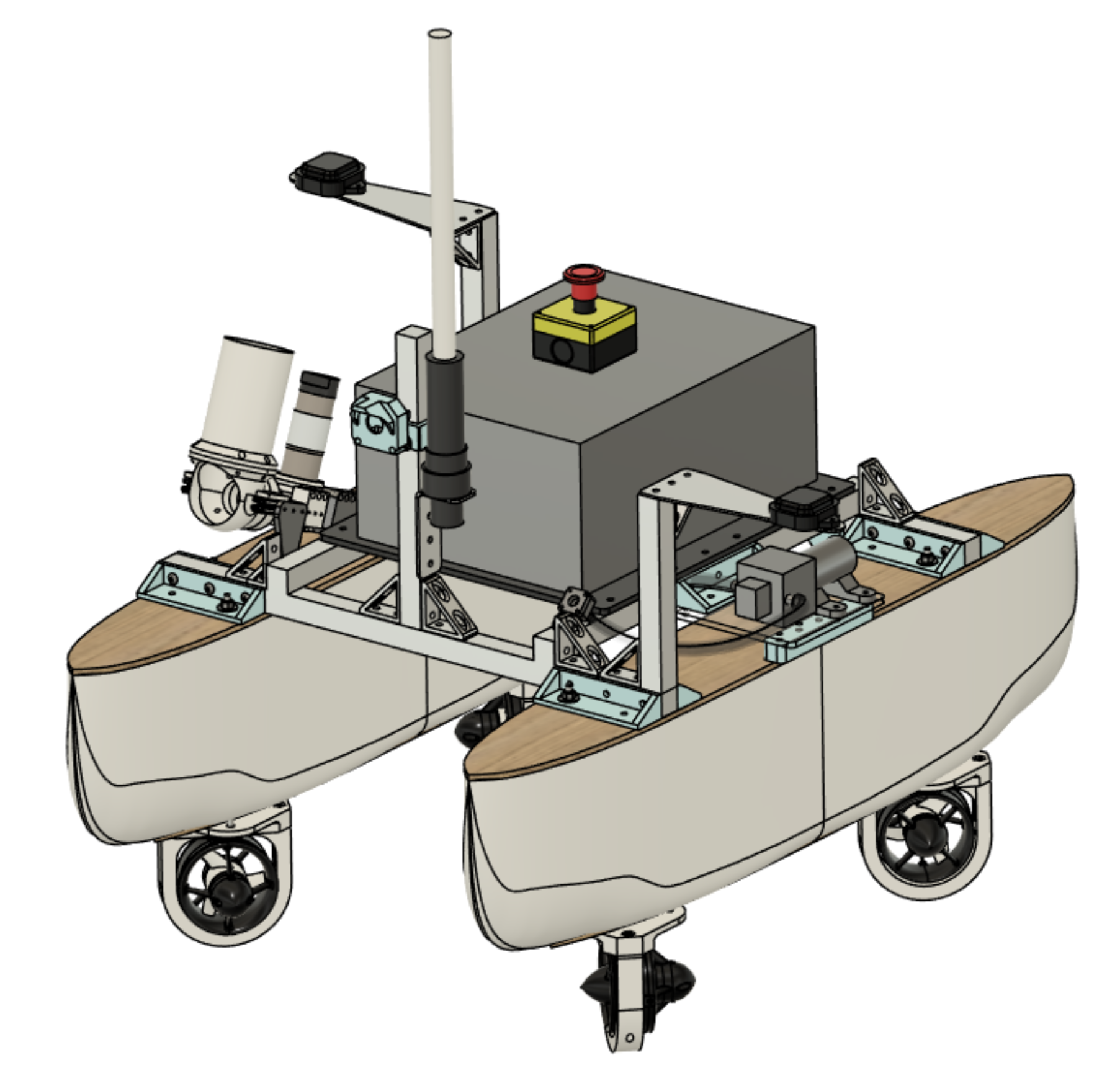
Weight
20.4 kg
Degrees of Freedom
3 (Surge, Sway, Yaw)
Power System
14.8V, 15.6Ah Li-Ion battery (x1)
Perception Sensors
Oak–D LR W PoE camera for stereo vision and object detection (x1)
Wireless Communications
5.8GHz Ubiquiti Bullet AC IP67 (x2)
915 Mhz Telemetry
WiFi
RC 2.4GHz ELRS
Dimensions
1 m x 0.6 m x 0.9 m
Endurance
Full Throttle – estimated 20 min runtime
Normal Usage – estimated 45 min runtime
Main Processor
Nvidia Jetson Xavier NX
Propulsion System
T200 thrusters (x4)
Navigation System
Centimeter Precision GPS RTK
Dual Antenna GPS Heading
Adafruit BNO085 IMU
Software Architecture
Linux-based (Ubuntu 22.04)
Python, C++, Bash
Payload
Water Pump
Racquet Ball Launcher