
RoboBoat > Electrical
RoboBoat - Electrical
Overview
The electrical system is divided into two main parts, with each part housed in a separate box. The system is divided based on the interference caused by the electronic speed controllers and the high current carrying wires on the computational parts and the magnetometer housed in the GPS module.
The power delivery box houses the battery, power distribution board, 12 Volts and 5 Volts linear regulators, electronic speed controller and the on/off switch.
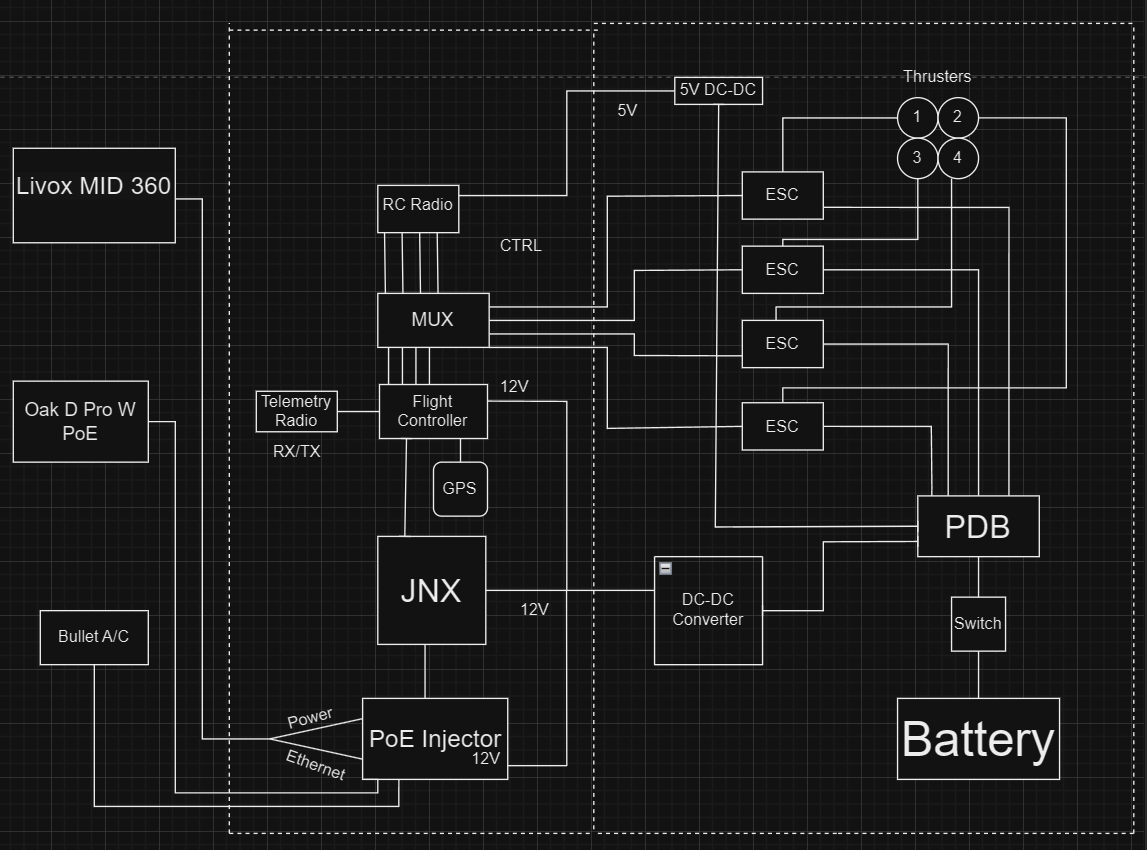
Battery: We are using a 4 cell (14.8 Volts) Li-ion battery to power the boat.
Power Distribution board (PDB): The power distribution board implements circuit breakers in the form of fuses for each component and keeps the electronics safe in case of a failure of one of the parts or a short circuit.
Linear Regulators: Some of the electronics (RC receiver and PoE injector) have a working voltage range of either 12V or 5V and cannot be connected directly to the power delivery board which outputs the battery voltage.
Electronic Speed Controller(ESC): The ESCs take command from either the flight controller or the RC receiver through a multiplexor in the form of PWM signals and spin the thrusters.
On/Off switch: The switch is a failsafe mechanism which disconnects the battery and power distribution board in case of an emergency.
Computation and controls: A box separated from the battery, linear regulator, and PDB, holds the flight controller, PoE injector, multiplexor, RC receiver and Nvidia Jetson NX computer.
Flight controller: We are using a Mateksys H743-Wing V3 flight controller that takes commands from the Jetson NX computer and provides instructions to the ESCs in the form of PWM signals