
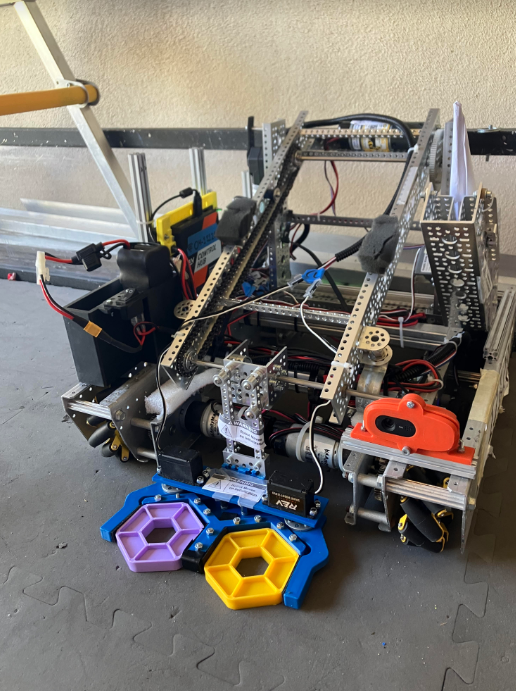
Andy
Our FTC team consists of 11 people, 6 returning members and 5 new members. Our third robot, Andy, was built to compete in the Centerstage challenge for our third league meet. This robot can hang, shoot a plane, pick up and deposit pixels on the backboard, and get 50 points during autonomous.
League Meet 1 Robot
Our first league meet robot, we made a drone launcher, a hanging mechanism, an intake, and an outtake.
This was our prototype robot where we tried our initial designs, including input from all of our team members.
Game Strategy:
During autonomous, our robot parked in the backzone, which gave us 5 points.
During teleop, we got pixels from the human player and deposited the pixels in the backzone.
During endgame, we launched our drone, aiming for the zone 1 to earn 30 points.
Lessons Learned:
The hanging mechanism didn’t work as we didn’t have a strong enough motor
Our outake’s spool kept getting tangled and the servo wasn’t strong enough to bring the slides up, so we had the intake take and deposit pixels to the backzone.
League Meet 2 Robot
For our second league meet we developed an autonomous program and made the base drivetrain smaller for maneuverability. We added capability by creating a hanging and shooting mechanism and updating our intake system.
Game Strategy:
During autonomous, start with 2 preloaded pixels to place on the backboard and pushed to the spike mark for autonomous. After it the robot places a pixel on the spike mark corresponding to the team prop, places a pixel on the backboard at the indicated april tag, and parks, it scores 50 points during the autonomous period.
We knew that if everything went well, the robot would score 50 points during autonomous and 50 points during endgame. If we added a claw mechanism, it would only score 15 points as we had a hard time traveling between the rigging so the time to develop a working intake and lift system was not worth it for this specific iteration.
League Meet 3 Robot
With our lessons learned, we were able to create an improved robot with a claw that picks up two pixels and a more consistent hanging and drone launcher for league meet 3.
Game Strategy:
Like league meet 2, for our autonomous we start with 2 preloaded pixels to place on the backboard and the spike mark, and then park.
We added a claw so we can put pixels on the backboard which is worth more points than pushing pixels into the backzone, which is what we did before.
We added the hanging mechanism onto the our claw arm to use the actuators that already extend upwards.
To improve the accuracy of our drone launcher we used a different plane design that and adjusted the tension of the rubber band so the plane lands consistently in zone 2 scoring 20 points





