Blue Boi
2019's robot, Blue Boi, was built to compete in FIRST's challenge: ROVER RUCKUS presented by Qualcomm. Our robot was able to pick up minerals (2'' - 3'' plastic cubes and balls) and place them into the lander specified slots (center scoring element). It was also able to pull itself up onto the lander.
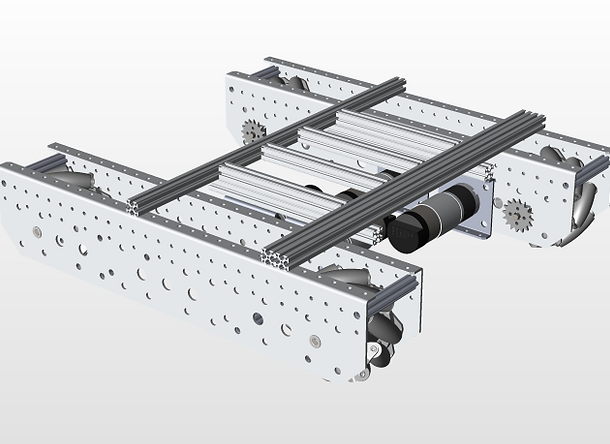
Drivetrain
Through the design process of improving and repeating, we changed out the original configuration from having orbit 20:1 NeveRest gearmotors for 40:1 NeveRest gearmotors to allow for more effective chain tension. KISS (Keep It Simple Silly) was implemented into the drivetrain by using the TETRIX mounts. These mounts are intuitive to use as they come in one piece making for easy usage. Parallel prototyping was used by using a mecanum drivetrain from the summer for development and using the drivetrain we had from Velocity Vortex for the final design. We modified the drivetrain by cutting off the bottom corners of the front of the robot. This allowed us to partially park in the crater, and collect easier. We also used rev bars to attach the tilter and hanger. In the design review, we included a decision matrix with all the possible drivebases we could use. We used this to decide our drivebase.
Hanger
The hanger went through many changes. The design process was implemented by first using a normal Actobotics beam to hang. We then tried a one way gate. The hanger went through 4 iterations. Parallel prototyping was implemented as we had multiple robots with multiple types of hooks to allow for the team to test out new configurations. In the beginning, we had a Lego claw as an idea. We also used rev extensions, drawer slides, and Actobotics linear actuators to test out all our hanging choices. Because the hook was facing the robot, we used a simple beam to hang. This took advantage of our mecanum drive base. We could strafe into the hook instead of having to do a fancy maneuver. In the design review, we included our first hanger and why we wanted it. We wanted to KISS.
Mineral Collection System
Our collector has gone through many iterations. At first, the collector was too heavy, so we had to change it. Then we built a new collector which was also too heavy. We built a light collector that collected from the back instead of the front, and this proved to be better. Now we had a simple box and size sorter that has worked the best so far. KISS is easily seen in our collector. It consisted of 3 parts: the collector box, the x rail with surgical tubing, and a size sorter. All of these parts were screwed onto the extension slides.
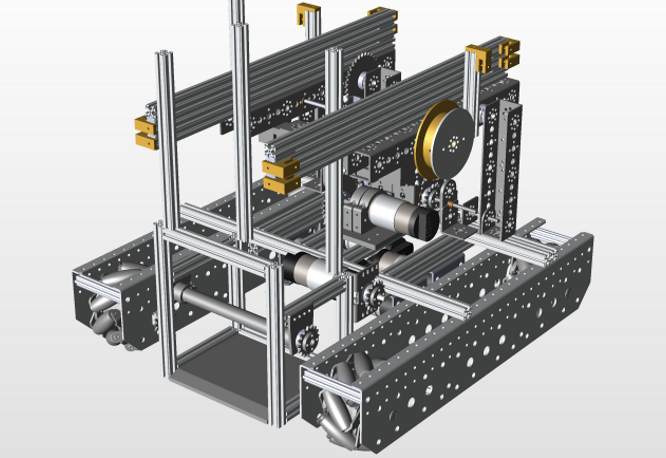
Tilter
3 iterations were made on the tilter. The first one ran on one worm gear gearbox. This gearbox bent. We then changed it to a tilter with sprockets and chains instead. The last iteration was to replace the axle with a hex shaft. This was in response to the set screws digging and eating the axel. This produced a lot of play. The tilter was very simple. It only had one point of rotation and the extension gearbox for the extension slides were direct driven by the core hex motor. The tilter was a difficult mechanism to design. This is why we have 10 iterations in the CAD. This helped us conceptualize what worked and what didn’t. Because our tilter was not strong enough to hold itself in midair, we needed to add an internal bumper to hold the tilter up while depositing. This was very innovative because it folded neatly into our robot, and unfolded when the robot deployed.